这段时间公司要做基于XMPP协议的聊天社交软件,提前学了些。搜了些资料,总结了一下。发出来。 设计基于开源的XMPP即时通信协议,采用C/S体系结构,通过GPRS无线网络用TCP协议连接到服务器,以架设开源的Openfn’e服务器作为即时通讯平台。 系统主要由以下部分组成:一是服务器,负责管理发出的连接或者与其他实体的会话,接收或转发XML(ExtensibleM
来源: 基于XMPP协议的Android即时通信系 – 老牛比 – CSDN博客
以前做过一个基于XMPP协议的聊天社交软件,总结了一下。发出来。
设计基于开源的XMPP即时通信协议,采用C/S体系结构,通过GPRS无线网络用TCP协议连接到服务器,以架设开源的Openfn’e服务器作为即时通讯平台。
系统主要由以下部分组成:一是服务器,负责管理发出的连接或者与其他实体的会话,接收或转发XML(ExtensibleMarkup Language)流元素给授权的客户端、服务器等;二是客户终端。它与服务器相连,通过XMPP获得由服务器或任何其它相关的服务所提供的全部功能。三是协议网关。完成XMPP协议传输的信息与外部消息系统可识别信息间的翻译。再就是XMPP网络。实现各个服务器、客户端间的连接。系统采用客户端(Client)/服务端(Server)架构体系结构。
客户端:
客户端基于Android平台进行开发。负责初始化通信过程,进行即时通信时,由客户端负责向服务器发起创建连接请求。系统通过GPRS无线网络与Internet网络建立连接,通过服务器实现与android客户端的即时通信脚。
服务器端:
服务器端则采用Openfire作为服务器。允许多个客户端同时登录并且并发的连接到一个服务器上。服务器对每个客户端的连接进行认证,对认证通过的客户端创建会话,客户端与服务器端之间的通信就在该会话的上下文中进行。
1.1服务器端设计(这块几乎可以说是有成品了。不用多纠结)
Androidpn服务器端是Java语言实现的,基于openfire开源工程,Web部分采用的是spring框架,这一点与openfire是不同的。Androidpn服务器包含两个部分,一个是监听特定端口上的XMPP服务,负责与客户端的XMPPConnection类进行通信,作用是用户注册和身份认证,并发送推送通知消息。另外一部分是Web服务器,采用一个轻量级的HTTP服务器,负责接收用户的Web请求。
主要的四个组成部分,分别是SessionManager,Auth Manager,PresenceManager以及Notification Manager。SessionManager负责管理客户端与服务器之间的会话,Auth Manager负责客户端用户认证管理,Presence Manager负责管理客户端用户的登录状态,NotificationManager负责实现服务器向客户端推送消息功能。
系统客户端基于Android手机平台。采用XMPP作为即时通讯协议。XMPP是基于XML,实现任意两个网络终端准实时的交换结构化信息的通信协议。采用Android平台提供的XML解析包对XML进行解析。由于应用活动都运行于主线程。故用多线程技术来解决系统通讯问题。针对通信安全问题.系统的用户信息和聊天信息在客户端存储在Android平台自身所带的SQLite数据库中,多媒体文件和图片文件存储在Android平台虚拟文件存储设备SD Card中。
通讯模块负责与服务器建立通讯旧。通过创建3个线程来进行处理。分别负责消息的发送、接收和心跳信息的发送;解析模块主要用来解析XML数据流。根据解析元素不同类型封装成不同的数据对象:数据模块定义整个客户端中大部分的数据类型和对象;应用模块包括即时通信、图片浏览和音乐播放。是客户端和用户交流的接口;加密模块对发送和接收的消息进行加解密。以确保通讯数据的安全。
系统的客户端分为5大模块进行设计开发,如图2所示。
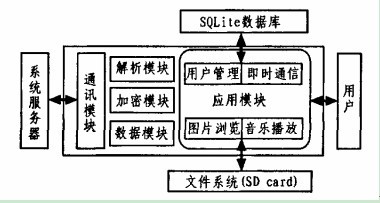
通讯模块负责与服务器建立通讯旧。通过创建3个线程来进行处理。分别负责消息的发送、接收和心跳信息的发送;解析模块主要用来解析XML数据流。根据解析元素不同类型封装成不同的数据对象:数据模块定义整个客户端中大部分的数据类型和对象;应用模块包括即时通信、图片浏览和音乐播放。是客户端和用户交流的接口;加密模块对发送和接收的消息进行加解密。以确保通讯数据的安全。
加密(首先将二进制码转换成BASE64码,在转换成BASE64码之后,再进行MD5加密,)
XMPP服务器之间、客户与服务器之间采用的是TCP连接罔。TCP提供一种瓦向连接、可靠的字节流服务。保持一个实时双向的传输通道。TCP将用户数据打包构成报文段。它发送数据后启动一个定时器,等待对端数据确认,另一端对收到的数据进行确认,对失序的数据重新排序,并丢弃重复数据;TCP提供端到端的流量控制。计算和验证一个强制性的端到端检验。但是GPRS网络对TCP链路存在一个限制。当TCP链路在长时间无有数据流量时。会自动降低此链路的优先级直至强制断开此链路。所以在应用中.采用发送心跳的方式来维持此链路。
数据格式
XML是XMPP系统架构的核心。它能表述几乎任何一种结构化数据。特别是XMPP利用XML数据流进行客户端一服务器端、服务器端一服务器端的通信。XML数据流一般是由客户端发起至服务端,XML数据流的有效时间直接与用户的在线会话有效时间相关联。
协议消息格式
XMPP协议包括3个顶层XML元素:Message、Presence和IQm。Message用来表示传输的消息,当用户发送一条消息时。就会在流的上下文中插入一个Message元素,中间有用户发送的相关信息;Presence用来表示用户的状态。当用户改变自己的状态时。就会在数据流的上下文中插入一个Presence元素,用来表示用户现在的状态;IQ用来表示一种请求,响应机制,从一个实体发送请求,另外一个实体接受请求并响应。
后台Servic:
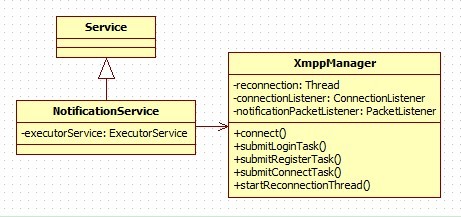
从类的层次看这个结构比较简单,让其变得复杂的是,其里面有三个线程:主线程,进行Xmpp通信线程,连接出错重试线程。
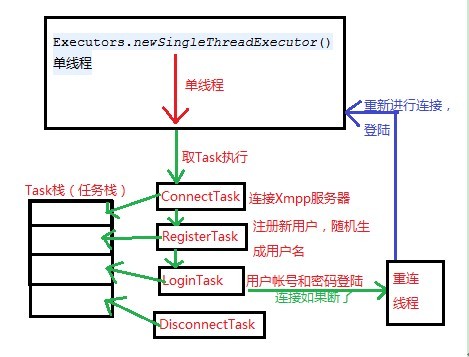
对图说明:
1. 在NotificationService里创建一个单线程,让其对服务器进行连接,由于使用Xmpp连接服务器要分为三步:连接,注册,登陆。所以用一个栈来保存要执行的Task任务(ConnectTask,RegisterTask,LoginTask),还后再按这个顺序进行执行。
2. 连接Xmpp服务器的线程用的是Executors.newSingleThreadExecutor(),这个本身可以不停的submit任务。为什么还要自己用一个栈来保存Task了
3. 连接线程在连接,注册,登陆的过程中,都有可能出错,都可能会失败,这时我就要有一个重连的机制,在Androidpn里开了另外一个线程来进行重试,其重试不是每次都按多少秒来进行重试,而是有其自己的规则。
4. 在LoginTask里,如果登陆了服务器端,其就会注册一个监听器,用于监听服务器push的数据包(Packet),再通过发送广播的方式来通知要进行显示的程序。
5. 在登陆服务器后,也有可能出错,所以在登陆后,会设置一个ConnectionListener,用于监听连接出错的时候,再合适重连线程,进行重连
6. 在登陆过程中,有一种错误要单独处理,就是账号和密码无效的时候,这个时候其返回的状态码是401,这种情况应该把本地保存的帐号和密码都清掉,再重新进行连接,不然会永远都登陆不上服务器端。
由于该系统所有的功能实现都是基于网络间的XML流的通信,所以,需要有一个模块专门负责网络问通信和XML流的处理,主要功能包括服务器和客户端之问通信时TCP套接字的处理,XML流的解析、存储等功能。
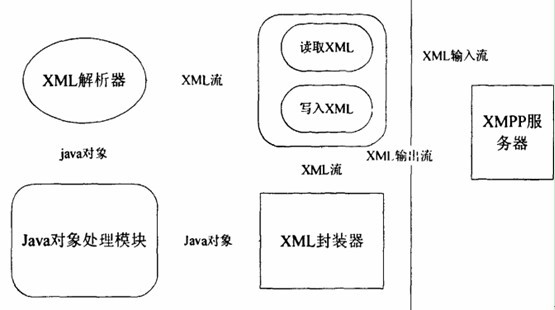
数据模块负责XML流的解析和封装的XML模块,主要功能是:将XML流解析成java对象,将iava对象封装成XML流;
其流程是XMPP服务器接收到XML流之后,会有渎取器将其读取出来并将其作为入口参数传入XML解析器,XML解析器通过对其命名空间的解析,从而确定将剩余的XML元素解析出来并传入相应的;ava对象中,从而最终将XML转换成iava对象,然后将iava对象传入应用程序模块中,实现其请求完成的功能并返回iava对象,但是该iava对象不能在网络中直接传输,必须先转换成XML节,于是,该iava对象会被传入XML封装器中,被封装成XML节,通过XMPP服务器的发送端口发往目的节点。
java对象处理模块处理流程如下:当该模块接收到iava对象时,会先将该对象通过解密算法和解密密钥解密成base64码,然后f耳将base64码转换成二进制码,从而实现对java对象的解析。当完成业务逻辑处理后,该模块会将返回的java对象先由二进制码转换成base64码,然后用加密算法将其加密,这里的加密算法是由双方在建立会话时通过三次握手协议协商的。
当XML节被封装成java对象后,必须被转发至订:确的模块中加以处理,这就要求有一个路由转发模块,如图3—3所示。该模块的实现原理是:在系统启动时加载该路由模块,从而在内存中创建了一块路由模块,记录了命名空和功能模块之间的对应关系,当iava对象被封装好之后,系统会读出其命名空间,再在路由表中查找其所对应的模块,从而动态地加载该模块,并将该java对象转发至该模块,从而实现路山转发的功能。
需要客户端源码的朋友可以去我的资源里找,或者本博文系列的最后一篇有地址。服务端源码不能给,那是公司的东西,抱歉!不要再问了哈